
With the availability of low-cost devices capable of capturing point cloud models, point cloud technology is gaining popularity, making it easy to obtain point cloud models from a large number of sources. Many software applications have added functionality to handle point clouds as a new type of model. This approach offers numerous advantages. However, what if you need to communicate a point cloud model to another 3D application that does not have native support for point clouds? Or what if you want to use a point cloud environment as a VR surround for your experience?
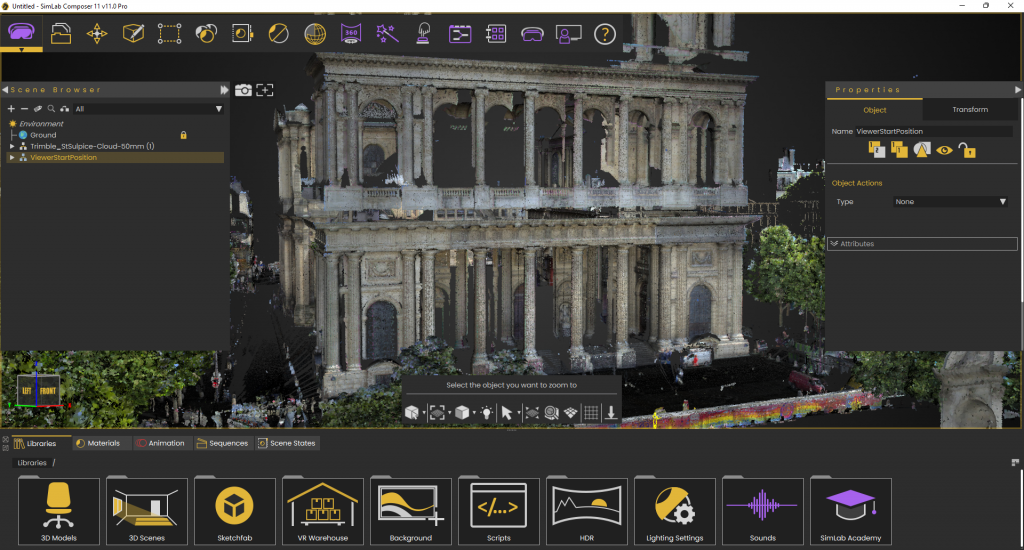
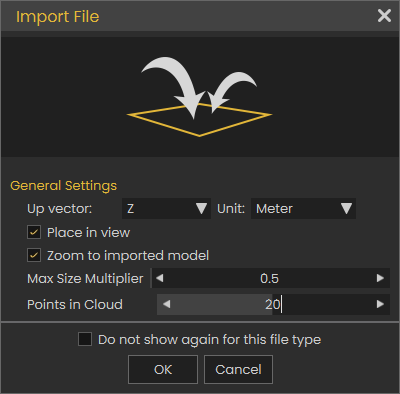
To address these challenges, SimLab Soft team has developed a special algorithm capable of reading different point cloud model formats, including (.xyz,.pcd, .e57,.las, *.laz). By importing the model, users can determine how many of the captured points should be retained in the generated 3D model.

Point cloud capturing devices typically add a large number of points, so it is often logical to select a percentage of captured points to generate an efficient 3D model. The algorithm then constructs a 3D model that is ready to be exported to any file format, such as OBJ, FBX, GLTF, etc., for use in various applications.
It simply generates a simple square for each point, and users have control over the relative size of the squares (large or small). The algorithm takes care of creating the squares in the best orientation and optimizing material usage to generate a 3D model that can be efficiently utilized by other applications. Overall, this new approach to point clouds offers a convenient solution for communicating and integrating point cloud models with different 3D models, as well as creating immersive VR experiences using point cloud environments.
-

1 How to Create Interactive VR Assembly & Disassembly Experiences with SimLab Composer
-

2 One Experience, Seamlessly Running on VR, MR, AR, and XR
-

3 Is My VR Experience Secure on the Cloud?
-

4 Bought VR Headsets for Your School… and Now They’re Collecting Dust?
-

5 How to Choose the Best VR Solutions for Universities: A Comprehensive Guide
-

6 Fast, Affordable Custom VR Experiences – Pay Only if You’re Satisfied!
-

7 Looking for VR Creators for Our SimLab VR Store
-

8 Why SimLab Soft is Creating VR Training for Medicine and Nursing Students
-
9 Seamlessly integrate VR Quizzes and Surveys into your LMS
-

10 Master 3D/CAD/VR File Conversion with SimLab CADVRter: Essential Tool for Designers and Engineers, and Related Professionals